
SIMATIC ROS Connector - ROSie¶
ROSie is a command-line-based code generation tool designed to facilitate the integration of ROS 2 with SIMATIC Software PLC connections based on shared memory. It operates based on a YAML configuration file to generate the required PLC and ROS 2 code.
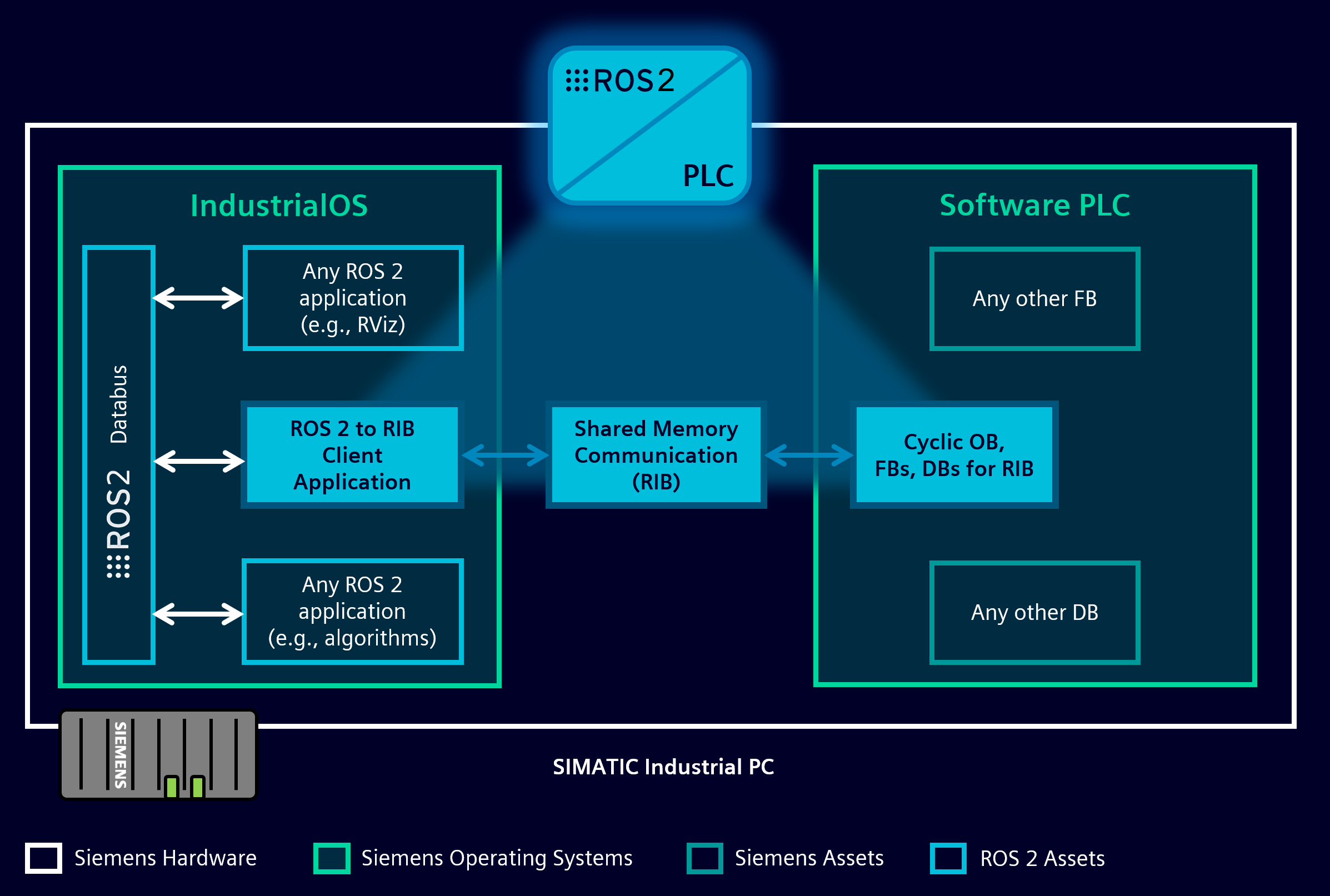
✔️ It allows you to have a connection between your ROS 2 runtime and your PLC system, which are both coexisting, running and sharing information among each other inside the same Siemens industrial hardware, combining the advantages of both worlds!
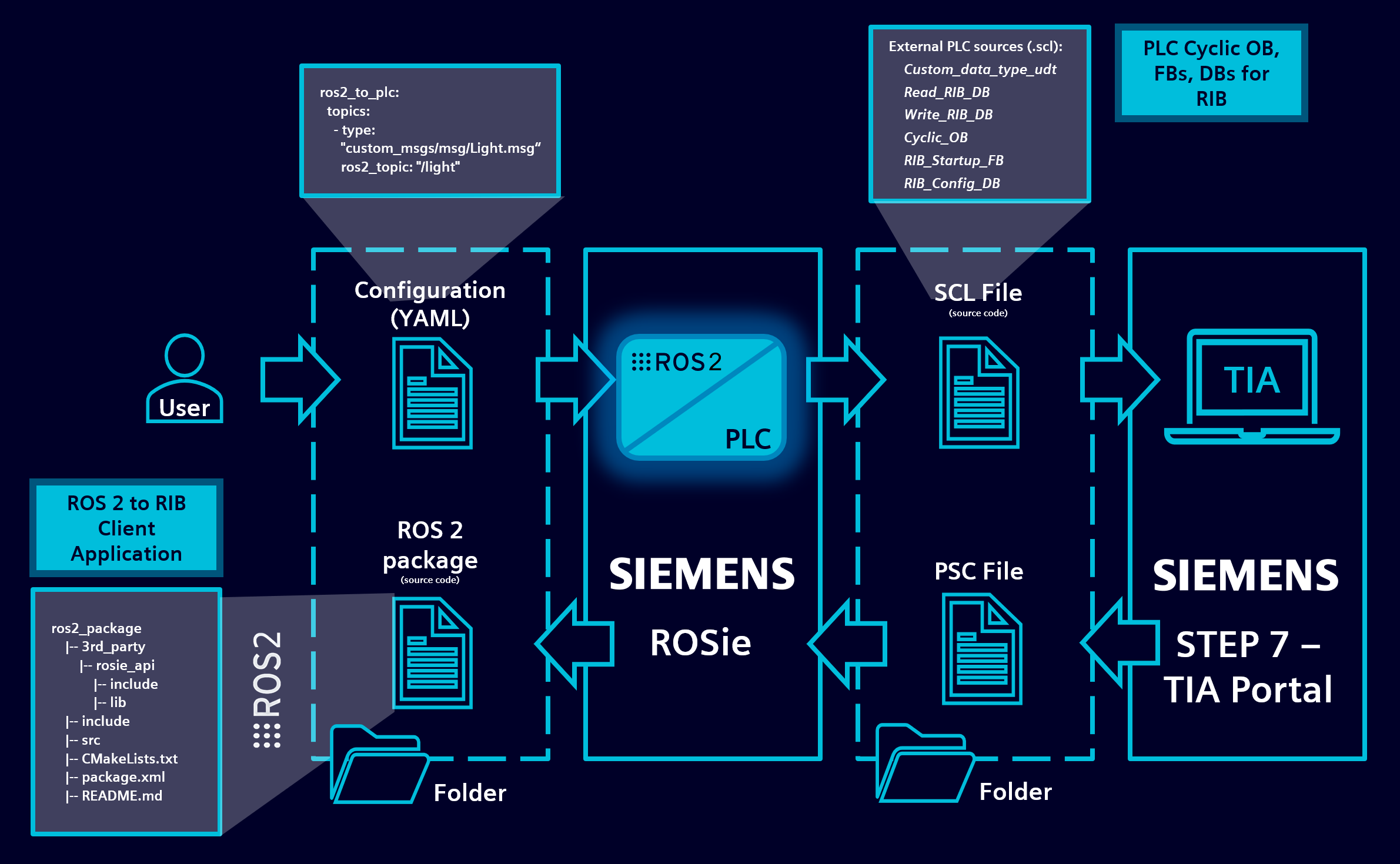
The process to integrate the communication between the systems consist of two steps:
1. Generate SCL Code: Generator creates a SCL source file that needs to be imported into your TIA-Portal project. It contains all program blocks required for the data exchange with ROS 2.
2. Generate ROS 2 package: A fully functional ROS 2 package is generated, which contains the connection to the Software PLC.
After the generation process, both programs can be executed on suitable devices.