
Requirements¶
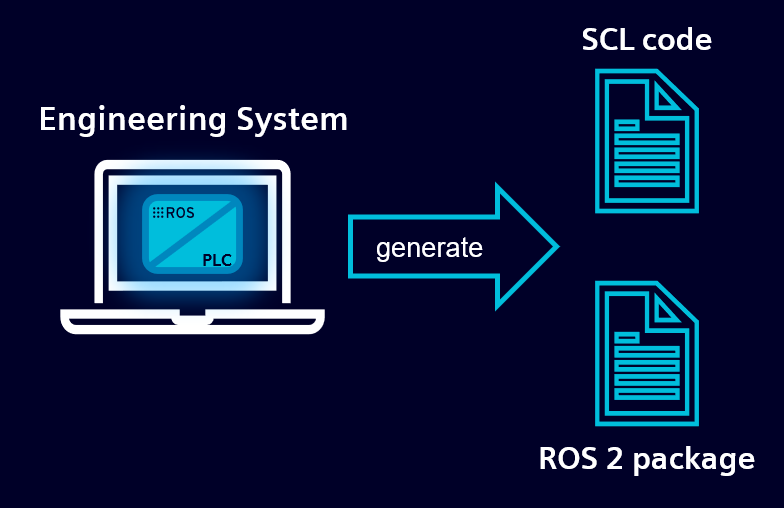
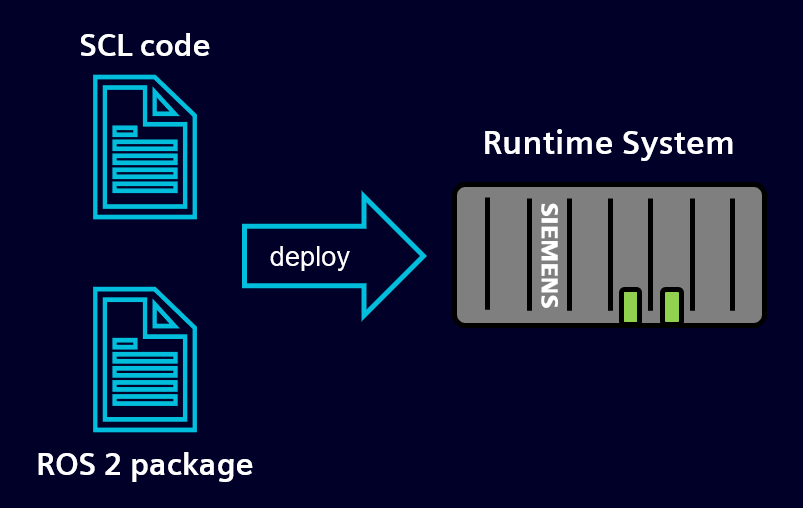
To utilize ROXSIE there are two systems involved:
- Engineering System: Used to run the ROXSIE generator (e.g., a Windows engineering machine with Linux as subsystem).
- Runtime System: Used to execute the generated code (e.g., a SIMATIC Industrial OS system with RIB and Software PLC).
1. Engineering System Requirements¶
Hardware¶
- Any x86/x64 based system
Software (all of the listed)¶
- ROXSIE container running in a Linux environment with access to ROS 2 installation via ENV variables
- Linux (e.g. SIMATIC Industrial OS, Ubuntu, Debian) + Windows 10/11 (for TIA Portal) operating systems
- ROS 2 running natively in Linux or in a container if installation is mounted to host to be accessible by ROXSIE container
- Docker (+ Docker Compose plugin)
>= v20.x.y - TIA Portal running in Windows 10/11
⚠️ Note: To be able to use the RIB with Software Controller v31.1, TIA Portal v20 >= Update 1 needs to be installed.
The use of virtual machines or Windows Subsystem for Linux (WSL) is recommended in order to have TIA Portal and ROS 2 running in parallel in the same system.
Please refer to the Engineering System Setup for a detailed step by step instruction on how to prepare your engineering system.
2. Runtime System Requirements¶
Hardware (one of the listed)¶
| Device | Name | Shipped IndOS Version | Shipped SW-PLC Version | Recommendations |
|---|---|---|---|---|
 | SIMATIC ET 200SP Open Controller CPU 1515SP PC2 - (F) | v3.x.y | v3x.y | 🔋 Embedded / Low Power - Ideal for compact installations - Direct IO modules access |
 | SIMATIC ET 200SP Open Controller CPU 1515SP PC3 - (F) | v4.x.y | v4x.y | 🔋 Embedded / Low Power - Successor to PC2 - Ideal for compact installations - Direct IO modules access |
 | SIMATIC IPC 427E | v3.x.y | — (must be purchased separately) | ⚖️ Balanced Performance - Great compromise between performance and efficiency |
 | SIMATIC IPC BX-39A | v4.x.y | — (must be purchased separately) | ⚖️ Balanced Performance - Successor to 427E - Great compromise between performance and efficiency |
All of the listed devices have been tested and verified to work with ROXSIE generated code.
This list is non-exhaustive and other devices might work with ROXSIE too as long as they fulfil the following software requirements.
Software (all of the listed)¶
- SIMATIC Industrial OS
- Realtime Information Backbone (RIB)
- SIMATIC S7-1500 Software Controller (PLC)
- ROS 2 (supported: Humble, Jazzy) installation to run the generated ROS 2 package (native or via container)
Software Version Compatibilities¶
The following table shows the supported software versions of all ROXSIE releases:
| ROXSIE | Software Controller | TIA Portal | Industrial OS | RIB | ROS 2 (tested) |
|---|---|---|---|---|---|
v0.1.0 | v30.1 | v19 | v3.4.2 | v2.1.1 | Humble |
v0.1.1 | v30.1 | v19 | v3.4.2 | v2.1.1 | Humble |
v0.2.0 | v30.1 | v19 | v3.4.2 | v2.1.1 | Humble, Jazzy |
v0.3.0 | v30.1, v31.1 | v19, v20 >= Update 1 | v3.4.2, v3.5.3 | v2.1.1, v2.2.4 | Humble, Jazzy |
v0.3.1 | v30.1, v31.1, v40.0 | v19, v20 >= Update 1 | v3.4.2, v3.5.3, v4.2.0 | v2.1.1, v2.2.4 | Humble, Jazzy |
Additionally, each Software Controller version requires a specific TIA Portal, Industrial OS and RIB version:
| Software Controller | TIA Portal | Industrial OS | RIB |
|---|---|---|---|
v30.1 | v19 | v3.4.2 | v2.1.1 |
v31.1 | v20 >= Update 1 | v3.5.3 | v2.2.4 |
v40.0 | v20 >= Update 4 | v4.2.0 | v2.2.4 |